Bonjour à tous,
Un beau Soleil en ce dimanche malgré quelques passages nuageux qui partiront vers 10 heures du matin, heure légale.
Il fait 4°, pas de vent et une turbulence plus que moyenne.
Avec les 20° de l'appartement, j'ai du attendre une bonne heure pour la mise en température et attendre que le Soleil juste au dessus des immeubles en face de chez moi aille vers une zone un peu moins chauffée !
Cela a été plus correcte vers 11h30 alors que je capturais tous les quart d'heures depuis 10h00 !
Mais les films sont vraiment de la soupe, inexploitables ce qui n'a pas été le cas de cette dernière série de capture.
Tout d'abord, je rencontre toujours de gros soucis avec le flat d'Autostakkert, si on le fait trop sombre, les images résultantes sont saturées et cramées en blanc ! Si on fait le flat trop clair, l'image résultante voit toujours les poussières de capteur et consorts !
Bref sur trois images de flat, aucune n'a été bonne pour Autostakkert, les zones actives un peu blanches au niveau des taches ne pardonnent pas.
J'ai du donc traiter mes films avec Avistack 2.
Je mets les réglages de la Skynyx 2.1 M avec son filtre UV/IR Cut Baader.
Capture start time = Sunday, 02 December 2012 11:22:40 HL
Capture duration = 82.03 sec
Captured frames = 1200
Dropped frames = 40
Capture frame speed = 15 fps
Camera = Lumenera SKYnyx2-1M #6110288
pixel size = 4.65 x 4.65 µm²
Image type = Light frame
RoI size = 1392x1040
Frame rate = 15.1 fps
Capture format = Ser / 16Bit
Exposure = 39.2 ms
Gain = 1.13
Gamma = 1.00
Contrast = 1.00
Brightness = 0.0
Image flipping = None
J'ai retenu 100 images sur 1200 à un pixel de décalage, c'est dire la "qualité " de la turbulence !
Le matos est toujours le même à savoir Zeiss AS100/1000 couplé avec un Coronado de 90 mm et un BF 15. Un oculaire de 15 mm Eudiascopique me sert pour le répérage des zones intéressantes à imager et pour le réglage du TuneMax.
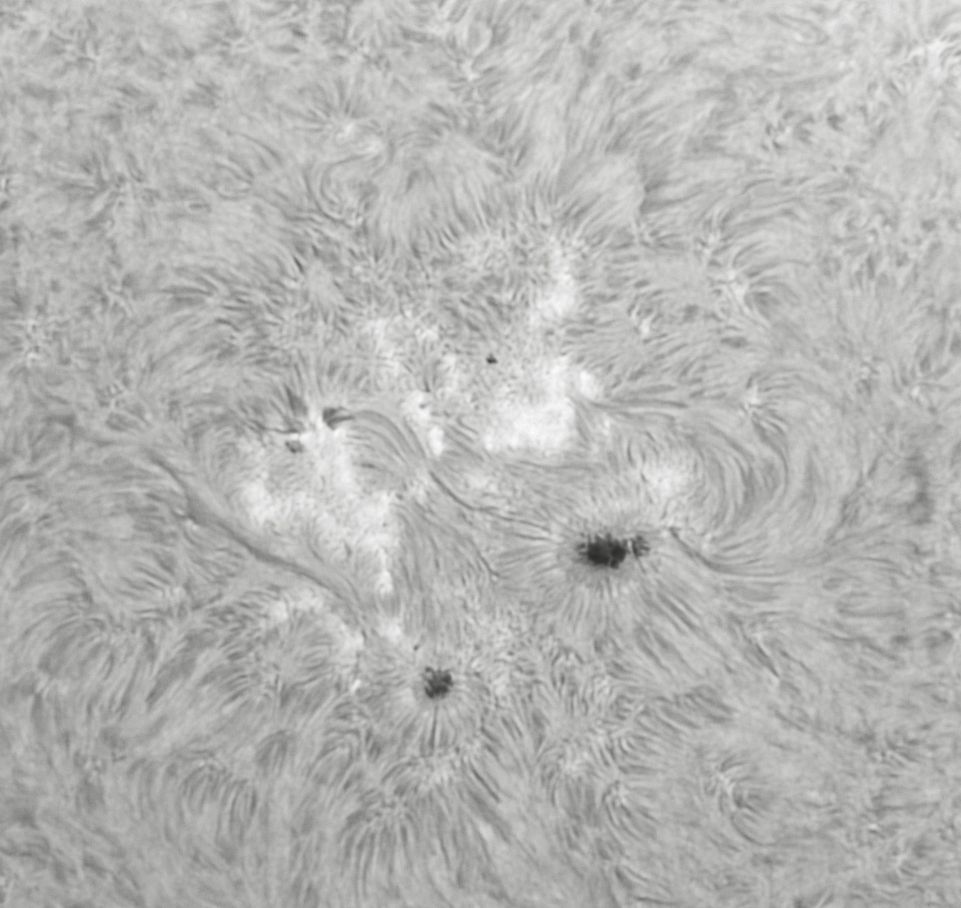
Il y a donc trois ensembles de taches à savoir AR 1621 (prochaine image) et AR1623_AR1625 pour cette image (AR1623 pour la plus grosse tache).
Une belle protubérance à l'Est du Soleil, une plus discrète au sud-est. Des filaments bien épais sur le globe à l'ouest mais sans trop de détails.
Une fois obtenu mon image avec Avistack en 16 bits en TIFF.
Moulinette Photoshop
Réglages des niveaux (CTRL L)
Renforcement 1,5 pixel à 500 %
Technique de l'estampage à 79° , force 3 hauteur 130 en incrustation.
Luminosité contraste à +10 +8 respectivement.
Save jpeg en 8 bits.
Amicalement.